Grashof’s Law
Grasoff’s law states that for a four-time linkage system, if the sum of the shortest and longest lengths of a planar quadrilateral linkage is less than or equal to the sum of the remainings two links, then the shortest link is independent of respect.
It can be rotated to a neighboring link. In a four-bar series, there are four turning pairs and no sliding pairs. Mark the shortest link of the four-bar linkage with S and the longest link by L, and the other two links by P & Q. The necessary condition to satisfy the Grashoff law is:
S + L ≤ P + Q
This situation is divided into two cases: –
- Now, Let Us See the First Case, I.e., S + L < P + Q.
- Now, Let Us See the First Case, II.e., S + L = P + Q.
Case I. S + L < P + Q:
By fixing different links one at a time, this case produces three mechanisms. These mechanisms are:-
- Double Crank Mechanism.
- Double Rocker Mechanism.
- Crank and Rocker Mechanism.
#1. Double Crank Mechanism-
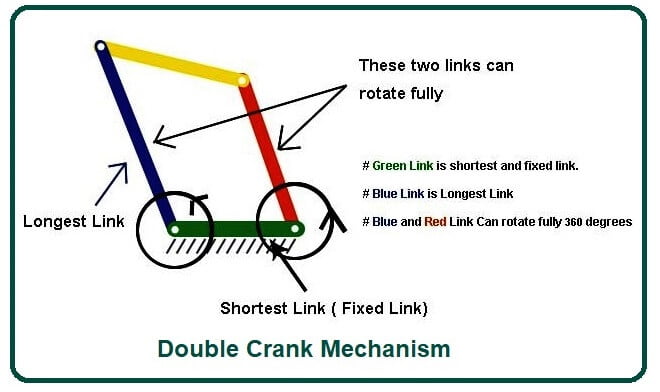
- It is also known as the crank mechanism or drag link mechanism.
- In the double crank mechanism, the shortest link that is s is fixed or grounded. In this mechanism, both links on a fixed link can rotate 360 degrees.
#2. Double Rocker Mechanism-
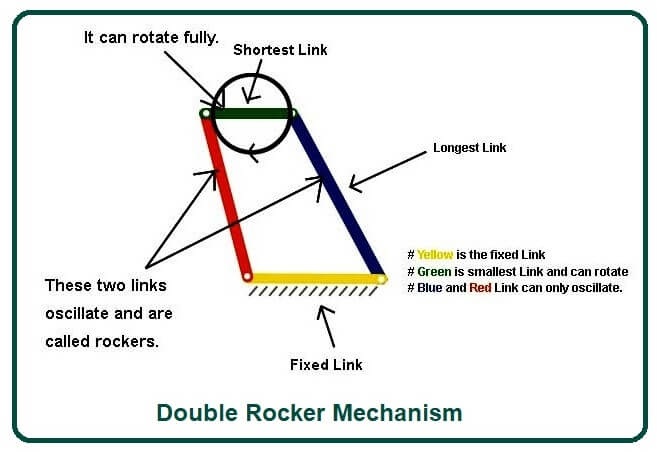
- In a double rocker mechanism, the link is fixed or grounded as opposed to the shortest link.
- In this system, the shortest link can rotate 360 degrees.
- The shortest link is called a coupler. Both links given to a fixed link can oscillate. These two links are called rockers.
#3. Crank and Rocker Mechanism-
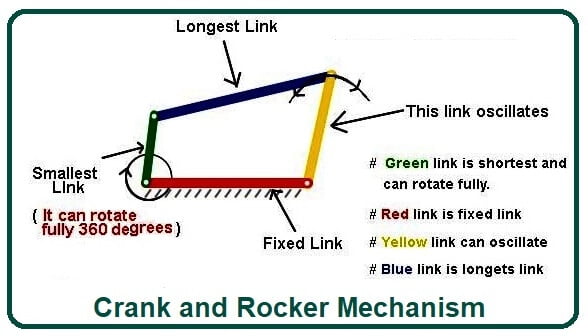
- In the crank and rocker mechanisms, the link adjacent to the shortest link is fixed or grounded.
- In this system, the shortest link rotates, and the second link is caught by fixed link oscillations.
Case II. S + L = P + Q:-
In such a kinematic chain, the links become collinear at least once per revolution of input cranks.
This case is divided into two cases: –
- Case 1:- Length of All Links Are Distinct.
- Case 2:- Length of Any Two Link Are Same.
Case 2.1:- Length of All Links Are Distinct-
If the length of any two links is the same, then the length of the remaining two links will also be the same because of the equation S + L <P + Q.
Case 2.2:- Length of Any Two Link Are Same-
If the length of any two links is the same, then the length of the remaining two links will also be the same due to the equation S + L < P + Q.
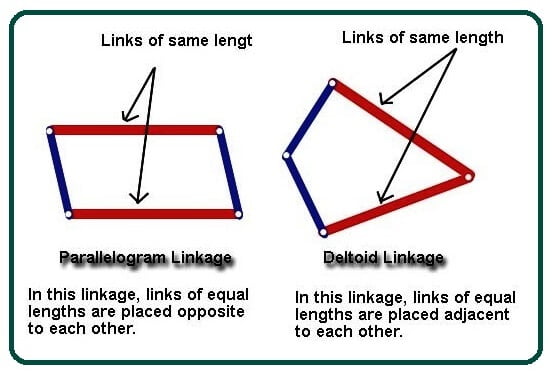
In such a case, two links are possible depending on the placement of the link: –
- Parallelogram Linkage:- In this linkage, links of equal length are placed opposite to each other.
- Deltoid linkage:- In this linkage, links of equal length are placed adjacent to each other.
In both cases, the inversions obtained are either a crank winding or a double crank mechanism. These two linkages change the situation when the links collide.
In the change point state, the output crank speed becomes unpredictable. It can go either of two ways. The inversion is a crank winding or double crank, depending on the speed of the output crank in the change point position.
Now let’s looks at the case when the length of the shortest and longest link is greater than the length of the remaining two links.
Ie S + L> P + Q
In this case, no single link can make a complete revolution, regardless of whether the four-link is fixed. So, in this case, there is only one inverse, and that is.
The Triple Rocker Mechanism
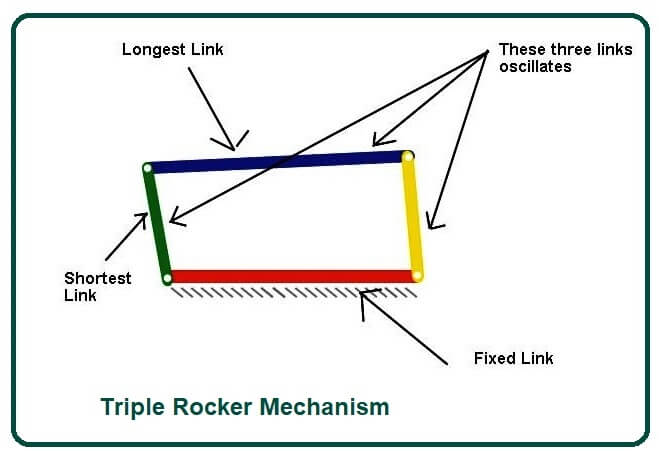
- In this mechanism, no link will be able to make a full revolution.
- All three links will oscillate except for the fixed links. These three links are called a rocker, and hence this mechanism is called the triple rocker mechanism.
FAQ
What is Grashof’s Law in the context of four-bar linkages?
Grashof’s Law states that in a four-bar linkage system, if the sum of the shortest and longest links (S + L) is less than or equal to the sum of the other two links (P + Q), then the shortest link (S) can rotate fully around a neighboring link.
What are the conditions required to satisfy Grashof’s Law?
The necessary condition is S + L ≤ P + Q. There are two main cases: when S + L < P + Q and when S + L = P + Q.
What mechanisms arise from satisfying Grashof’s Law?
Depending on whether S + L < P + Q or S + L = P + Q:
- Case I (S + L < P + Q): Double Crank Mechanism, Double Rocker Mechanism, Crank and Rocker Mechanism.
- Case II (S + L = P + Q): Can lead to Collinear Conditions and different linkages like Parallelogram and Deltoid linkages.
What happens if S + L > P + Q?
If S + L > P + Q, only one mechanism, known as the Triple Rocker Mechanism, is possible. No single link can complete a full revolution in this scenario.
How does Grashof’s Law impact the performance of mechanical systems?
Understanding Grashof’s Law helps in designing mechanical systems with predictable motion characteristics. It determines the range of motion and types of mechanisms that can be implemented based on the lengths of the linkage components.
What are some practical applications of Grashof’s Law?
Grashof’s Law is applicable in various mechanical systems, such as robotic arms, engines, and machinery where controlled motion and linkages play a critical role in functionality and efficiency.
How can Grashof’s Law be utilized in engineering design?
Engineers use Grashof’s Law to optimize the design of linkages to achieve specific motion requirements while ensuring mechanical stability and efficiency.